
Contexte
Objets représentables par analogie
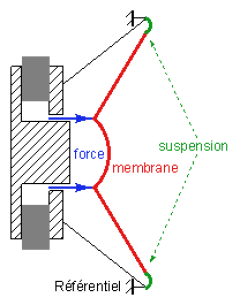
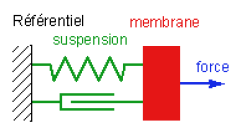
Beaucoup de systèmes mécaniques réels peuvent être correctement approximés par un nombre fini d'éléments mécaniques discrets.
En différenciant les principaux phénomènes mécaniques, il est ainsi possible de les représenter sous forme de masses indéformables, raideurs sans masse, etc.
Les exemples qui illustrent ce cours se limitent à des déplacements en translation, mais la même approche convient pour des translations et rotations multiples.




